
版本:1.2
大小:518 KB
环境:PC端
日期:2013- 6-18
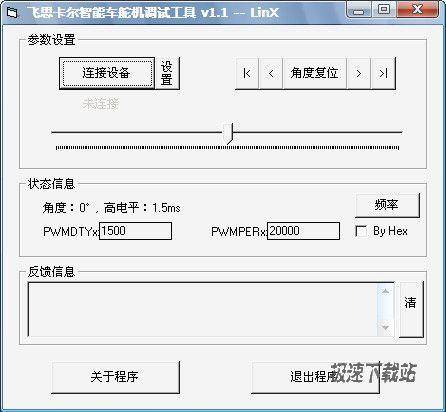
飞思卡尔智能车舵机调试工具专为方便舵机调试而编写。
角度转换为高电平时间
角度 -45 0 45 (anger/度)
高电平时间 1000 1500 2000 (t/us)
计算公式为:T = 1000 + (anger + 45) * (1000 / 90)
该程序可以通过串口与单片机进行通讯,实时改变舵机的角度。
通讯协议为:0xfe 0xMM 0xNN (其中0xfe为包头,0xMM为PWMDTYx高8位,0xN为PWMDTYx低8位)
在串口中断中分三次接收,在第二次接收时保存数据到temp0中,在第三次接收到数据时将PWMDTY01= ((unsigned int)temp0 <<8) RxData 就可以完成PWM改变输出了。